
Engineering Portfolio: Chris Berthelet
Modular Robotic Arm
Description
Gallery
This project was for my Senior Mechatronics Design course at UC Berkeley. The goal of our project was to design a versatile and scalable robotic arm with adjustable length and degrees of freedom (DoF). The user of the robot has the ability to quickly modify the arm, and thus use it for a wide array of tasks. Such a robotic arm would be useful at smaller companies or workshops, where there is not enough capital to purchase many expensive and limited robotic arms.
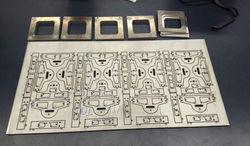
Our robotic arm is comprised of single DoF segments that can be stacked on top of one another as well as offset by 90 degrees to provide custom motion. Each segment is driven by a gear-motor and has encoder position feedback. Mechanical and electrical connections are made via a universal mate and latch system.
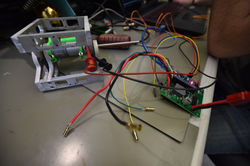
All modules are connected to a shared and scalable power rail. Each segment has a PCBA and is locally controlled by an Arduino Nano. Centralized command comes from a Raspberry Pi "motherboard" that communicates via I2C protocol to the Arduino Nano "children" at each segment. The ability to easily program a repeatable task was implemented via push buttons; the arm would memorize and repeat a task manually programmed by the user.
 |  |  |
|---|---|---|
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
Personal Contribution
My main contributions included:
-
Design of mechanical and electrical universal mating system
-
Design of encoder sensing setup
-
Selection and design integration of gear-motor
-
Programming of various Python functions
-
Machining and manufacturing
Technical Development
The technical skills that I developed included:
-
CAD design in SolidWorks
-
Programming in Python
-
Embedded Systems
-
Sensor/actuator characterization and integration
-
Prototyping via 3D printing
-
Manual and CNC machining
Documentation
GitHub Repo: https://github.com/ych09041/supercool