
Engineering Portfolio: Chris Berthelet
Autonomous Line Following Racecar (NATCAR Competition)
Description
The purpose of this project was to transform a 1/10th scale RC car chassis into an autonomous racecar that follows a white tape track. The car was designed to compete in the 2017 NATCAR competition at UC Davis (http://www.ece.ucdavis.edu/natcar/).
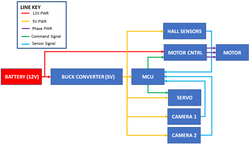
This mechatronics system is composed of TSL1401CL Line Scan Cameras, a BLDC motor with hall effect sensors, a servo motor, custom PCBA's, a FRDM K64F microcontroller, and custom mechanical hardware. Our car won 1st place for the in-class race as well as 3rd place in the NATCAR competition.
Gallery
 NATCAR Day |  |  |
|---|---|---|
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
Personal Contribution
My main project contributions included:
-
Prototyping of BLDC motor drive circuit
-
Algorithm and tuning to control exposure time for line scan camera
-
Design of microcontroller shield PCBA
-
Design of mechanical hardware
-
Programming of velocity and steering control algorithms
-
Code timing, integration, and testing
Technical Development
The technical skills that I developed included:
-
Programming in C++
-
PCBA design in EAGLE
-
CAD in SolidWorks
-
Embedded systems (mbed Library)
-
Sensor/actuator characterization and integration
-
Electronics bench testing
-
Perf-board and PCBA soldering
-
Prototyping via 3D printing